> For the complete documentation index, see [llms.txt](https://algorithm.prettylog.com/llms.txt). Markdown versions of documentation pages are available by appending `.md` to page URLs; this page is available as [Markdown](https://algorithm.prettylog.com/algorithm-problems/daily-algorithms/11.-minimum-spanning-tree-points.md).
# 11. Minimum spanning tree - points
[MST (Minimum Spanning Tree)](/overview/3.-how-to-construct-algorithm-paradigm/mst-minimum-spanning-tree.md)
1584\. Min Cost to Connect All PointsMedium3.7K85Companies
You are given an array `points` representing integer coordinates of some points on a 2D-plane, where `points[i] = [xi, yi]`.
The cost of connecting two points `[xi, yi]` and `[xj, yj]` is the **manhattan distance** between them: `|xi - xj| + |yi - yj|`, where `|val|` denotes the absolute value of `val`.
Return *the minimum cost to make all points connected.* All points are connected if there is **exactly one** simple path between any two points.
**Example 1:**
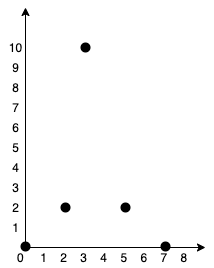
Input: points = [[0,0],[2,2],[3,10],[5,2],[7,0]]
Output: 20
Explanation:
We can connect the points as shown above to get the minimum cost of 20.
Notice that there is a unique path between every pair of points.
**Example 2:**
Input: points = [[3,12],[-2,5],[-4,1]]
Output: 18
**Constraints:**
* `1 <= points.length <= 1000`
* `-106 <= xi, yi <= 106`
* All pairs `(xi, yi)` are distinct.
{% embed url="" %}
## Prim
***
> Time:\
> Prim: ((V + E)logN), E insert logV ⇒ ElogV, V remove logV ⇒ VlogV\
> adjs Creation: O(N^2)\
> Total: O(N^2)
> Space: O(N^2) every points can be connected to each other
```jsx
/**
* @param {number[][]} points
* @return {number}
*/
function Node(vertex, precedessor, dist) {
this.vertex = vertex;
this.precedessor = precedessor;
this.dist = dist;
}
var minCostConnectPoints = function (points) {
// first need to find weights between each point pair
const dist = {};
// V^2
for (let i = 0; i < points.length; i++) {
dist[i] = [];
for (let j = 0; j < points.length; j++) {
const distance = getDistance(points[i], points[j]);
dist[i][j] = dist[i][j] ?? [];
dist[i][j] = distance;
}
}
const minHeap = new Heap([], (a, b) => a.dist <= b.dist);
const visited = new Set();
minHeap.insert(new Node(0, 0, 0));
let sum = 0;
// V
while (minHeap.size > 0) {
// logV
const node = minHeap.remove();
// required filter
if (visited.has(node.vertex)) {
continue;
}
sum += node.dist;
visited.add(node.vertex);
const adj = dist[node.vertex];
// E
for (let there = 0; there < adj.length; there++) {
// can do another filter optional
// if (visited.has(there)) {
// continue;
// }
const d = dist[node.vertex][there];
// logV
minHeap.insert(new Node(there, node.vertex, d));
}
}
return sum;
};
function getDistance(p1, p2) {
return Math.abs(p1[0] - p2[0]) + Math.abs(p1[1] - p2[1]);
}
function swap(arr, a, b) {
[arr[a], arr[b]] = [arr[b], arr[a]];
}
```
---
# Agent Instructions
This documentation is published with GitBook. GitBook is the documentation platform designed so that both humans and AI agents can read, navigate, and reason over technical content effectively. Learn more at gitbook.com.
## Querying This Documentation
If you need additional information that is not directly available in this page, you can query the documentation dynamically by asking a question.
Perform an HTTP GET request on the current page URL with the `ask` query parameter:
```
GET https://algorithm.prettylog.com/algorithm-problems/daily-algorithms/11.-minimum-spanning-tree-points.md?ask=
```
The question should be specific, self-contained, and written in natural language.
The response will contain a direct answer to the question and relevant excerpts and sources from the documentation.
Use this mechanism when the answer is not explicitly present in the current page, you need clarification or additional context, or you want to retrieve related documentation sections.